一 下载安装激活CLion
按照网上给的教程就可以
二 配置ROS
1.配置CLion的启动方式
在主目录打开隐藏文件.bashrc,命令是:sudo gedit ~/.bashrc 将CLion的启动文件clion.sh的路径设置为环境变量 PATH 这样在终端里,无论在哪个工作目录下都可以输入clion.sh即可启动CLion。
设置的代码是:
export PATH=/home/zyw/CLionPack/clion-2020.1.3/bin:$PATH 这个路径是安装CLion的路径,不同的人安装的路径可能不同
之后 source ~/.bashrc
网上其他的教程会说每次启动clion要先进入到ROS的工作空间下面,执行“source devel/setup.bash”,然后在运行clion.sh。个人感觉这种方法非常繁琐,可以在点击clion图标启动的时候就source系统环境。
找到jetbrains-clion.desktop,找不到可以搜索一下,然后用gedit打开将Exec="/home/zyw/clion-2020.1.3/bin/clion.sh" %f,改成Exec=bash -i -c “/home/zyw/clion-2020.1.3/bin/clion.sh” %f
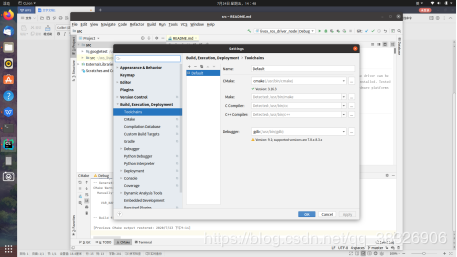
2.设置CLion的CMake为本地的CMake
在终端输入clion.sh或者点击其图标打开CLion,在setting中打开build中的toolschain:设置CMake Debugger
3.创建ROS的工作区以及功能包
这个就比较简单了,参考网上的其他教程即可 为了每次避免打开终端时都需要运行以下devel文件夹下的setup.sh文件,同样也需要将setup.sh的路径写入bashrc文件中,命令为:
source /home/zyw/ws_livox/devel/setup.bash
然后source ~/.bashrc
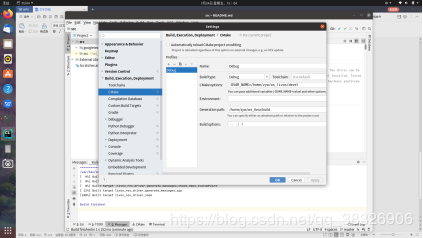
4.在当前工作区启动CLion并且设置ROS的工作路径
同样打开setting转到build选项下边,选择CMake选项在CMake options这一个空格中设置-DVAR_NAME的值,这里设置ROS当前的工作区的devel文件夹,这个文件夹主要是放一些可执行文件的。
设置的路径为:-DVAR_NAME=/home/zyw/ws_livox/devel
然后设置生成路径为:当前工作区的build文件夹,这个文件夹主要是放一些编译产生的中间文件。我的路径是/home/zyw/ws_livox/build
设置完这些基本上就可以正常编译运行ROS啦!
PS:根据wiki上边的安装教程CLion还可以安装一些ROS的插件,用来运行ROS的一些节点的,但是具体的功能和作用我还没有弄明白,我也是ROS刚刚入门。
总结
到此这篇关于详解ubuntu20.04下CLion2020.1.3安装配置ROS过程说明的文章就介绍到这了,更多相关CLion2020.1.3安装配置ROS内容请搜索以前的文章或继续浏览下面的相关文章希望大家以后多多支持!



